
高可用、高精度的室内外无缝定位技术对人们未来的生活起着至关重要的作用,是推动大众创新、万众创业的的科技源动力,是支撑国家战略需求的重要组成部分。
室外定位在GNSS卫星定位技术的支撑下已经日趋成熟,在有广域增强服务的支持下更可显著提高定位可用性,并实现优于1m 的定位精度。
另一方面,随着市场(特别是大众消费相关行业)对室内定位需求的不断增加,室内定位已逐渐成为学术界的研究热点和工业界的投资热点。投入研发的企业不仅包括初创公司,还包括像Apple、Google、Qualcomm、Intel、Cisco、阿里巴巴、百度、华为等商业巨头。
目前国际上高可用室内定位技术的定位精度普遍在2~5m之间。优于1m定位精度、低成本并且广域覆盖的室内定位技术依然是实现高精度室内外无缝定位的最大障碍。室内定位的难度源于复杂的室内空间和受干扰的无线信号传播环境。
由于室内空间和信号环境的复杂性,很难找到一种类似于GNSS的室外定位技术。如果不考虑设备成本,有很多手段能提高室内定位精度,如测量机器人,超宽带(UWB)定位技术,室内GNSS(Locata)等。这些高成本的定位技术能轻易实现dm 级、cm 级甚至mm 级的精密定位。对于低成本的移动设备如智能手机和可穿戴设备,要实现优于1m 的定位精度,难度已经很大。最主要的原因是这些低成本的移动设备的内置传感器的测量精度很低。
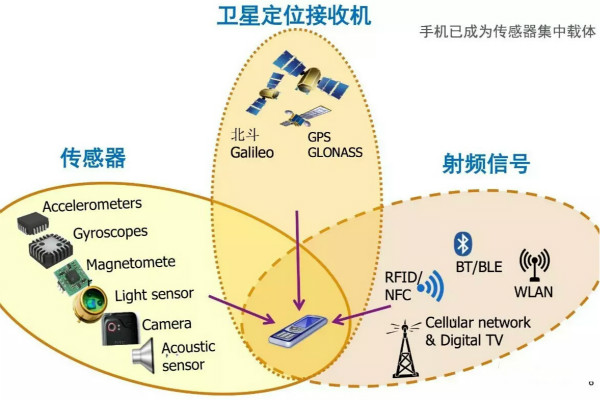
图1 智能手机内集成的传感器及信号接收器
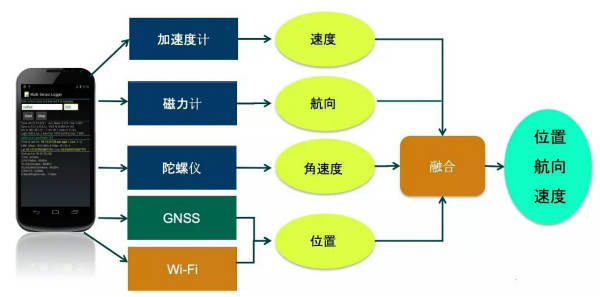
图2 现有智能手机室内外无缝定位解决方案
如图1所示,目前智能手机已内置丰富的传感器、支持多种射频信号和卫星导航接收机。但大多数室内定位技术仅利用少数几种定位源。图2就是目前比较流行的一种解决方案:即利用智能手机的内置传感器如加速度计、磁力计及陀螺仪等;WiFi信号强度、GNSS卫星导航信号等。将这3种信号源的测量信号进行融合,最后可以获得1~3m的定位精度。目前比较流行的多源融合方法包括卡尔曼滤波、粒子滤波和机器学习等。
目前,1~3m的定位精度能够满足普通应用的定位精度需求。但对于一些特殊应用,例如盲人的室内导航,1~3m 的精度就满足不了要求,需要进一步提高。我们的在研项目是在现有的基础上,采用融合更多种定位源的方法来提高室内定位的精度和可靠性。新的定位源来自视频、音频、光源等传感器。根据不同定位源在物理层面的互补性,提出以高精度定位方法为控制基准,以无处不在的地磁特征和无时不有的手机内置传感器为纽带,融合各种基于射频、视频、音频、光源和室内特征的定位方法,实现即插即用的高可用、高精度全源混合定位。原理可以用图3清晰地表示出来。
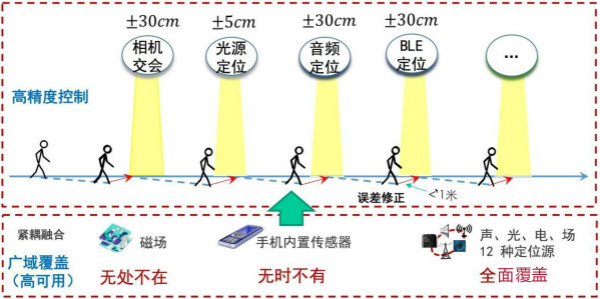
图3 声、光、电、场全源定位方案
基于手机的位置服务应用范围非常广泛,主要有:
1)室内导航;
2)人流动线分析;
3)精准营销;
4)移动健康;
5)室内三维建模;
6)室内智能停车;
7)虚拟实境(virtual reality,VR)在体育转播中的应用;
8)混合现实游戏;
9)应急救援VR应用等。
举一个智能手机位置服务应用的例子。我国从2000年始已进入老龄化社会。2014年我国65岁以上老年人口达到1.38亿,占总人口比例为10.1%,预计2020年这一比例会达到12.8 %。特别是现在城市大多是独生子女家庭,孩子们在外工作,老人们独自生活,人到老年一般都会手脚有些不灵活或受到其他健康疾病的困扰,如老花眼、精神恍惚等。
孩子们想要随时掌握老人们的状况,特别是当老年人发生紧急情况时,可以一键给亲人报警,而亲人也能即时获取该老年人的位置,进行实时处理。如果智能手机能够感知老年人的运动模式(如步态、步频等)、居家活动状态(如上卫生间次数、开冰箱次数、吃饭次数、看电视时间长短、睡觉时间长短等)等,就可以对老年人的健康状况进行分析与评估。特别是当老年人出现跌倒、走失等特殊事件时,智能手机能够感知并自动报警。
美国苹果公司的Siri语音机器人、美国谷歌公司的AlphaGo围棋机器人等,都在社会上引起了广泛的关注。这些以人工智能(artificialintelligence,AI)为核心的产品以各种形式存在于我们生活中。要让AI产品得到更广泛的应用,更高精度的移动地理空间计算必不可少。AI产品的“智商”越高,就需要更高精度的空间信息和更高程度的地理空间认知。
AI产品未来会随时随地服务于我们的生活。例如,当你离开办公室后,你家里的“AI们”就会根据你回家途中的情况,计算你到家的时间,从而判断什么时候打开家里的空调或暖气,什么时候开始做饭等;当一个盲人进入陌生环境,如博物馆,他的“AI”们会告诉他这是什么地方,所在空间的三维几何信息、拓扑关系,为他导航,讲解他周围的作品等等。而要实现这些功能,就需要高精度的定位结果和空间认知作为支撑。
一般情况下,“AI”们的操作过程概括为3个阶段:感知、认知和行动。感知的过程需要大量传感器来感知我们的物理世界,包括对这些传感器的信号进行接收、检测、转换、简约、合成、编码、储存等。认知的过程就是通过深度学习的方法来分类和识别我们的物理世界。
我们的团队正在研发一个“手机思维引擎”。希望手机能更好的感知我们的行为,明白我们的意图以便更好的服务于我们。比如当你下班回家等车时,你的手机思维引擎会自动告诉你要等公交车现在在哪里,还有几分钟到达。整个过程你不需要做任何手机操作。
我们把整个思维引擎分为很多“小脑”,每个小脑去认知一个比较单一的问题,以便简化这些“小脑”的算法。实际上每个小脑就是机器学习中的各种分类器和算法,包括位置认知、行为认知、语义认知、目标认知、拓扑认知、网络认知、环境认知等。
通过传感器获取的海量数据,利用高效的云计算和深度学习等方法实现数据挖掘、“智慧”更新,将这些“小脑”相互关联起来,产生新的“智慧”,为用户提供更多智能应用,让智能手机更好的服务于我们。
原文改编自《导航定位学报》
引文格式:陈锐志.手机思维引擎引领智能位置服务—陈锐志教授专访[J].导航定位学报,2017,5(1): 1-3 .DOI:10.16547/j.cnki.10-1096.20170101.











{{item.content}}