
光学卫星遥感影像的几何定位精度取决于卫星平台硬件观测精度及数据处理水平。自20世纪90年代起,随着卫星在轨几何定标、定姿、定轨及时间同步等技术的发展,光学卫星遥感影像的严密成像几何模型精度的提高,光学卫星的几何定位和处理逐步摆脱了对大量地面控制点的依赖,向稀少地面控制发展。现代卫星平台采用高精度定轨、定姿和时间测量器件,无地面控制几何定位精度越来越高。2007年起发射的WorldView系列卫星,其无地面控制定位精度达到3.5 m(CE90);2011年起发射的Pleiades系列及SPOT-6/7卫星,其无地面控制定位精度达到10 m(CE90);2008年发射的GeoEye-1卫星,其无地面控制定位精度更达到2.5 m(CE90)[1-2]。可见,当前国际先进高分辨率光学卫星的无地面控制精度已发展到2~3 m,使得未来高分辨率卫星遥感影像应用逐步摆脱地面控制点的限制,实现无地面控制的高精度几何处理和应用。
过去20年,我国高分辨率光学遥感卫星首先实现了从无到有的跨越式发展。“十一五”期间,我国发射了多颗军民高分辨率光学遥感卫星,军用分辨率达到1 m,民用分辨率达到2.36 m,但是无地面控制几何定位精度仍处于在数百米量级,与国外差1~2个数量级,无法满足立体测绘、目标侦查、灾害预警等高精度应用需求。而近5年来,随着资源三号等测绘卫星的成功发射应用,我国卫星摄影测量理论和技术得到了极大的提升。基于高精度姿轨、时间测量技术和在轨几何定标技术,资源三号测绘卫星的单景无地面控制精度优于15 m,内部精度优于1个像素[3],达到国际先进水平,可支撑全球无地面控制测图工程的实施,并逐渐完善了卫星摄影测量高精度几何处理的理论和方法。
针对高分辨率光学遥感影像无地面控制高精度几何定位的关键问题,本文系统性地提出了完整的无地面控制精确处理理论与方法。本文方法以光学卫星全链路误差理论分析及定量建模为基础,将影像产品定位误差分解反馈于光学卫星平台指标论证阶段,指导高精度光学卫星平台的硬件设计及结构设计;并以最大限度地修正光学遥感卫星数据中存在的系统误差和偶然误差为目标,针对几何成像模型中存在的系统误差、影像内部畸变和影像间的拼接误差、姿轨观测偶然误差,分别提出了基于探元指向角的在轨几何定标方法、基于虚拟CCD的稳态重成像方法和基于虚拟控制点的大规模无地面控制区域网平差方法。采用本文的理论方法,我国资源三号测绘卫星影像的无地面控制定位精度优于5 m,全面优于法国SPOT-5、日本ALOS和印度P5等卫星,居国际同类卫星领先水平。该项成果结束了我国遥感卫星几何精度不高,无法用于精确测图的历史,为全球空间数据基础设施的建设和我国“走出去”的战略实施奠定了技术基础。
1 无地面控制几何定位的理论与方法
1.1 无地面控制几何定位模型
光学卫星严密成像几何模型以共线方程为基础构建。共线方程作为卫星影像几何处理的基本模型,其实质为相机投影中心、像点及对应的物方点三点共线[4],也可理解为在相机坐标系下以成像投影中心为起点、像点为终点的像方矢量Vimage与在物方坐标系下以投影中心为起点、像点对应物方点为终点的物方矢量V 共线[5-6],如图 1所示。
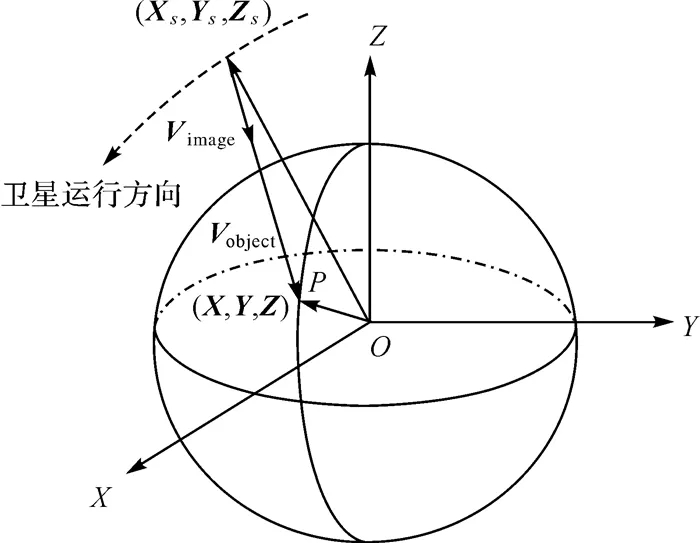
图 1 矢量共线图
Fig. 1 Collinear vectors
高分辨率光学卫星一般采用线阵CCD推扫成像方式获取对地观测影像。在每一成像时刻,卫星仅获取一行影像,随卫星运动形成连续的条带影像。每一扫描行影像是独立成像,且均为中心投影成像,满足投影成像共线方程。由此建立基本成像模型如式(1) 所示

(1)式中,x、y为像点在像方坐标系下的坐标;x0、y0分别表示为像主点在焦平面x和y轴方向的偏移;Δx、Δy分别代表物镜在焦平面x和y轴方向的畸变;λ为成像比例尺;
均为3×3的方阵,分别代表卫星本体坐标系到传感器坐标系、J2000坐标系到卫星本体坐标系,以及WGS-84坐标系到J2000坐标系的旋转矩阵,RBodycam通过实验室检校及在轨几何定标获得,在长时间内可认为是一个常数,RJ2000body(t)通过成像时刻t内插姿态观测四元数获得,RWGS-84J2000(t)为WGS-84坐标系到J2000坐标系的旋转矩阵;(X, Y, Z)T为像点对应地物点在物方坐标系下的坐标矢量;(XGPS, YGPS, ZGPS)T为GPS天线相位中心在WGS-84直角坐标下的坐标矢量,通过成像时刻t内插GPS观测值获得;(Dx, Dy, Dz)bodyT与(dx, dy, dz)bodyT分别为GPS的偏心矢量与投影中心的偏移矢量。
在无地面控制条件下,严密成像几何模型与地球椭球面模型相交,在高精度数字高程模型的支持下,进行目标几何定位,椭球模型如式(2) 所示
(2)式中,A=ae+h;B=be+h;ae=637 8137.0 m和be=635 6752.3 m分别为WGS-84地球椭球的长短半轴;h为观测目标的椭球高,在DEM数据的支持下,可通过地理坐标内插得到。
1.2 无地面控制几何定位关键技术
1.2.1 天星地全链路误差分析
高分辨率光学卫星遥感影像无地面控制的几何定位精度与成像各环节的观测精度有关,成像链路的几何误差建模分析是高精度几何定位处理的理论基础。由上文所述严密几何成像模型可知,影响因素包括卫星姿态观测精度、轨道观测精度、时间同步精度、相机参数精度及观测条件等。按测量误差特性分类,高分辨率光学卫星成像观测误差可分为粗差、系统误差和偶然误差[7]。粗差主要包含星上仪器观测、数据传输、数据处理过程中由于差错得到的错误值;系统误差主要包含相机星敏安装误差、GPS相位中心与投影中心偏差、相机CCD形变、主点主距及物镜畸变误差;偶然误差主要包含星敏姿态观测、轨道观测、星上时间同步及姿态高频震颤的随机误差。针对光学卫星定位多类误差源对高精度处理的复杂影响,本文从理论分析与仿真试验出发,构建了光学卫星全链路定位精度定量分析模型,包含各类观测误差源对影像几何质量的影响机理、数学建模及其相互之间的耦合性,为影像的高精度几何处理奠定了理论基础,并有效应用于卫星平台设计与指标论证,实现了光学卫星数据处理的天地一体化。
由全链路误差分析得知,高精度无地面控制测图的应用需求首先对卫星平台的硬件设计提出了时间、轨道及姿态测量的精度、频次要求。在此基础上,为最大限度地消除观测参数中的系统误差与偶然误差,地面数据处理系统需针对存在系统误差的观测参数进行标定补偿,并针对卫星平台的不稳定性及星载光学相机的结构特性采用高精度传感器校正方法,消除影像内部畸变;在单片影像内部精度一致性良好的基础上,可通过无地面控制区域网平差手段,利用一定范围内影像间的约束,进一步提高大范围影像的整体定位精度水平。
1.2.2 在轨几何定标模型与方法
卫星影像在轨几何定标是高精度卫星遥感测绘的瓶颈问题,其本质是补偿影像定位中存在的系统误差,由于卫星影像传感器内外部几何参数相关性、光学系统发射升空过程中的动态变形等难题,国产光学遥感卫星传感器的几何定标,特别是内部畸变的标定在较长的一段时间内一直是一个空白,导致国产光学卫星遥感影像不仅绝对定位精度低,内部相对精度也很有限[8-13]。针对该难题,这里提出了基于CCD探元指向角和相机安装角的综合指向角定标模型,有效地克服了线阵推扫成像内外部误差的强相关国际难题,精确地恢复了相机成像视场每个探元的光线指向,实现了内外方位元素和镜头畸变误差的精确标定;在此基础上,主持建立了我国第一个民用遥感卫星高精度几何定标场,如图 2所示。此外,针对在轨几何定标中存在的姿态测量误差的影响及某些区域可用特征少等问题,提出了基于自然地物点密集影像匹配和多检校场、多类型控制点的高精度几何定标技术和方法,实现了光学遥感卫星在复杂条件下的自动化几何定标。
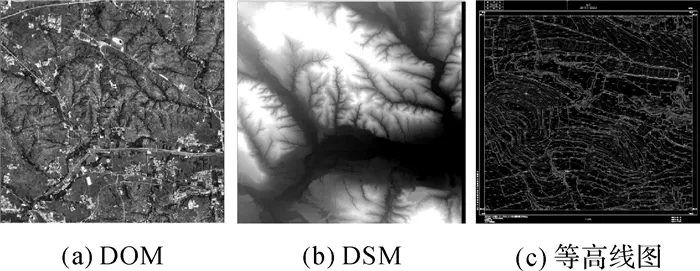
图 2 嵩山定标场示意图
Fig. 2 Songshan calibration site
基于该方法,自主研制了高分辨率光学遥感卫星几何定标系统,全面攻克了我国光学遥感卫星几何定标的技术难题,建立了光学遥感卫星影像在轨几何定标的技术体系,并成功应用于“资源三号”“资源一号02C”“高分1号”“高分2号”“遥感”系列等所有在轨光学遥感卫星影像的几何定标,将我国遥感卫星的内部几何精度从5~6个像元提高到了1个像元以内。“资源三号”等卫星的内方位元素标定精度优于0.25像元,影像单景无地面控制点定位精度提高到15 m[3, 14-15]。
1.2.3 稳态重成像几何处理模型与方法
为了满足高分辨率和宽视场成像要求,星载高分辨率光学相机设计复杂,主要表现为:① 采用折返式光学系统光路结构设计,光轴与视轴不重合、焦距与主距不一致、像主点与视主点不统一,导致CCD偏视场成像,内、外方位元素高度相关;② 采用多片TDI CCD拼接成像和多相机拼接成像,原始影像存在单片积分时间跳变、多片异速成像、多片CCD不共线、多波段不配准、双相机拼接等问题[16-17]。除此之外,随着分辨率的提高,平台震颤也成为影响高分辨率卫星遥感影像几何精度的重要因素之一[18]。
针对上述问题,本文提出了基于虚拟CCD的稳态重成像传感器校正方法,其基本思想是:利用理想无畸变的虚拟CCD线阵替代原始多片、多波段CCD在理想无平台震颤条件下成像,在高精度在轨几何定标、精密定姿、精密定轨技术支持下,分别建立原始影像与稳态重成像严密几何模型,然后基于原始影像与虚拟影像几何定位一致性原理,建立二者的坐标映射关系,生成完整无畸变的虚拟影像,同时生成高精度的有理函数模型(rational function model,RFM),为后续应用提供高精度数据基础。
利用资源三号卫星三线阵数据进行试验验证与分析,结果表明:基于虚拟CCD稳态重成像传感器校正方法可有效校正由于相机设计和平台震颤引起的影像内部畸变,将影像内部精度从1~2个像素提高到0.5个像素以内。将该方法应用到资源三号多光谱影像处理中,结果表明,该方法在校正影像畸变的同时,提高了波段配准精度,多光谱影像内部精度达到0.3个像素,波段间配准精度优于0.15个像素。
1.2.4 大规模无地面控制区域网平差方法
单景影像产品经在轨几何定标修正系统误差及稳态重成像处理优化内部精度后,由于存在姿轨观测偶然误差,单景仍无法实现定位的可靠性,且影像间存在较显著的配准、拼接误差,若要满足无地面控制测图的应用需求,必须通过无地面控制区域网整体平差处理技术[19-29]。针对该问题,本文在虚拟重成像技术生成高精度单片影像RPC模型的基础上,提出了一种基于虚拟控制点的超大规模无地面控制区域平差方法,在保证影像的初始定位精度的同时修正影像之间的相对定向误差,提高大规模影像的整体定位精度水平。
然而,在超大规模(万张以上影像)卫星摄影测量平差中,由于缺少控制点的约束,平差模型的自由度较高,直接将待平差参数作为自由未知数会导致法方程矩阵的病态,进而使得平差精度不稳定及误差容易过度累积而引起网的扭曲变形。此外,当影像数量较多时,影像和模型之间的复杂连接,大区域海量影像的连接点匹配和平差,均是境外大区域高精度测图需要解决的难题。针对大规模无地面控制区域网平差中存在的这些关键科学问题,分别采用超大规模卫星影像不规则区域网连接点自动匹配技术和平差技术,支持上万景立体影像的自动匹配、上亿个连接点规模的区域网平差处理,实现了自动挑点和粗差剔除技术,确保了连接点的良好分布、高重叠度和高可靠性。基于本方法开发的无地面控制大规模区域网平差处理软件不但可实现无地面控制条件下海量数据的联合处理,同时能够支持低重叠度、短基线、弱连接、不规则区域网结构等各种病态条件下的空三平差处理。
2 试验与分析
2.1 试验数据
基于本文方法对资源三号卫星获取的覆盖中国整个大陆的8802景三线阵立体像对(共26 406景影像)进行了无地面控制区域网平差试验。试验影像每景影像均附带RPC参数文件,相邻影像之间具有一定的重叠度,影像数据量约20 TB。测区覆盖面积约900万km2,约占中国国土面积93%以上,仅在广西、贵州等局部区域由于天气原因而缺少有效影像数据。测区内包含高原、山地、丘陵、平原及沙漠等多类地形,最大最小高程起伏达8000 m以上。为了对平差结果的几何精度进行分析与验证,在全国范围内通过GPS外业测量,共获取了约8000余个高精度控制点(平面和高程精度均优于0.1 m)。
资源三号卫星于2012年1月9日发射升空,在轨稳定运行后利用河南安阳定标场成像数据及高精度参考DOM/DEM数据完成三线阵相机的在轨几何定标,显著补偿相机内部畸变及平台安装关系等系统误差,单景影像平面定位精度从定标前1400 m左右提高到定标后15 m以内;进而采用基于稳态重成像的传感器校正方法,有效改善由平台运动等引起的内部畸变并提高影像内部几何精度到1个像素以内,生成试验数据每景影像的高精度RFM模型,为高精度无地面控制区域网平差处理提供基础。
2.2 试验方法
对上述ZY3卫星影像数据,利用100个高性能计算节点组成的集群计算环境(该环境由中国资源卫星应用中心提供,每个节点均配置了一个6核Xeon-L7455的CPU和128 GB的内存),约耗费2 h在整个测区内自动匹配了约300万个均匀分布且可靠性较高的连接点。并对各景影像在像方均匀划分3×3格网,对每个格网的中心点按前述方法生成虚拟控制点,每景影像生成9个虚拟控制点,共生成237 654个虚拟控制点。按照本文方法将生成的虚拟控制点与连接点一起进行联合平差,平差过程在个人普通PC机(CPU为双核Intel i5,内存空间为8 GB)上完成,仅需两次迭代解算就已收敛,共耗时约15 min。这表明,在常规自由网平差模型中,通过引入虚拟控制点作为带权观测值,能够有效改善平差模型的状态,使平差模型具有良好的收敛性。为了对平差结果的精度进行评价,分别对平差后生产的DOM产品的绝对几何定位精度和拼接精度进行验证。
2.3 试验结果
试验中利用覆盖全国范围的高精度外业控制点作为独立检查点,分别对DOM和DSM产品的平面和高程几何精度进行了验证。为了更加科学地分析区域网几何精度,特别是内部几何精度的均匀性,不仅对所有检查点整体统计其几何误差的均值、中误差和最大值等精度指标,还根据检查点的分布情况将全国划分为5个子区域,分别统计各子区域内的检查点几何误差的精度指标,结果见表 1。
表 1 平差后绝对几何定位精度统计
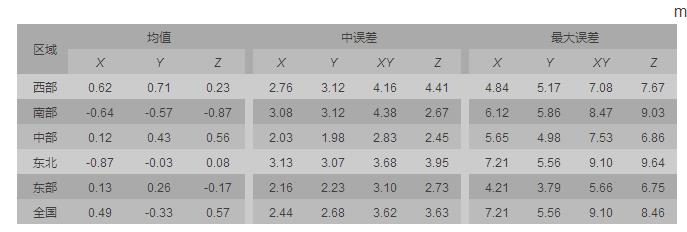
Tab. 1 Statistic of geometric accuracy after block adjustment
从表 1中可以得出以下结论:① 不论是平面还是高程方向,各子区域检查点误差的均值和中误差基本相当,无明显差异;② 各子区域平面和高程的误差均值均接近于0,区域网整体在空间中无明显的偏移性系统误差;③ 各子区域内检查点的平面和高程最大误差值均控制在3倍中误差以内。以上结论说明:① 虚拟控制点能够对区域网内部的误差累积起到一定的约束作用,避免了区域网的扭曲变形而使得中心与边缘精度不一致,保证了区域网内部几何精度的均匀性;② 每个虚拟控制点相当于一个具有一定精度的控制点观测值,根据平差理论,大量的虚拟控制点能够显著提高待平差参数的估计精度,从而实现网的无偏估计,为无地面控制点条件下达到有控制点的测图精度提供了一种简单实用的方法;③ 虚拟控制点的引入能够有效改善平差模型的状态,避免了无地面控制点时由于平差模型病态而导致解算结果不稳定、几何精度异常的问题,保证了平差结果具有高可靠性。
3 总结与展望
本文系统地介绍了高分辨率光学卫星遥感影像高精度无地面控制精确处理的理论与方法,分别从天星地全链路误差理论分析、在轨几何定标、基于稳态重成像的传感器几何校正和大规模无地面控制区域网平差3个方面对光学遥感影像全链路高精度几何处理的关键问题进行阐述,并将本文方法应用于资源三号卫星进行了验证,进而评价本文所提出方法的可行性。试验表明,本文的理论方法可以有效补偿资源三号测绘卫星数据中存在的系统误差和偶然误差,在轨几何定标后单景无地面控制精度提高到15 m,内部精度优于1个像素,经过无地面控制大区域空三处理后,影像的平面和高程精度进一步提高到5 m以内,满足全球1:50 000测图精度要求,为我国国产卫星影像支持全球地理信息资源建设奠定了工程应用基础。(作者:龚健雅,王密等)












{{item.content}}