
众所周知,车载激光雷达系统是面向自动驾驶的高精度地图制作的核心组件之一,而处理该系统获取的点云数据是高精度地图制作的必经环节,但是如何快速、智能处理海量点云数据却是行业公认的难点和痛点。
为解决这一难题,各家企业均投入了大量的人力和物力,但是截至到2017年底,国内市场上一直没有出现一款真正意义上的商业化点云智能处理软件,如今这一局面有望被“点云催化剂(Point Cloud Catalyst,PCC)”打破。
2018年2月23日,当大多数人还沉浸在新春的慵懒氛围中时,Innoviz Technology公司发布新款激光雷达扫描方案,正式拉开了2018自动驾驶领域行业竞争的序幕。
随后,谷歌Waymo、特斯拉、华为等自动驾驶领域一线企业均发布了最新进展,自动驾驶创业公司May Mobility和 Aurora 分别获得了1150万美元和 9000 万美元融资。
然而,在硝烟弥漫的自动驾驶市场上,有一股新兴的力量正在悄然兴起。据了解,一款名为点云催化剂(Point Cloud Catalyst,PCC)的点云智能处理商业软件日前在武汉经过了路测。其结果显示,装配了该软件的单台计算机工作站可以在24小时内完成500亿个点的处理和信息提取任务,且在无需训练样本的情况下实现高等级道路及道路周边点云自动分类和目标识别精度均在90%以上。该软件有可能成为国内第一款面向高精度地图制作的点云智能处理商业软件。
为了解该项目的具体进展,泰伯网记者独家采访了软件的研发者林祥国博士。
泰伯网:林博士,据了解此前你一直专注于摄影测量与遥感领域的研究,研究成果多与机载激光雷达有关,但是此次研发的软件却转向了车载激光雷达,并服务于自动驾驶领域。能否请你介绍一下激光雷达与自动驾驶之间的关系?
林祥国:随着科技的飞速发展,自动驾驶已经成为目前全球范围内一个新的发展趋势。在自动驾驶领域,目前有两大技术路径:一是“辅助驾驶”升级路线,其探测技术基础是摄像头(机器视觉)、毫米波雷达、超声雷达;二是“无人驾驶”路线,其探测技术基础是以激光雷达(LiDAR)为核心、并融合多种技术。
但是无论采用何种技术路径,自动驾驶依赖的关键数据之一便是高精度地图。高精度地图不仅可以提供高精度车道级信息及其它丰富的自动驾驶地图要素,还可以提供与之配套的专业定位图层和反馈闭环。
所谓的高精度地图,实际上是和我们现在已经普及的普通导航电子地图做比较来说的。高精度,一方面高精度电子地图的绝对坐标精度更高;另外,高精度地图所含有的道路交通信息元素更丰富和细致。
普通的导航电子地图会描绘出道路,而高精度地图不仅会描绘道路,更会描绘出一条道路上有多少条车道,会真实地反映出道路的实际样式。比如真实道路在某些地方变宽了,那么高精度地图中的道路数据也是变宽了,而某些地方因为汇合了而变窄了,高精度地图也是一样。
另外,每条车道和车道之间的车道线,是虚线,实线还是双黄线,线的颜色,道路的隔离带,隔离带的材质甚至道路上的箭头、文字的内容,所在位置都会有描述。
目前,高精度地图的生产通常分为外业采集、内业处理两大部分。其中,外业采集使用的硬件设备主要是移动激光扫描系统。
泰伯网:据了解,近两年随着自动驾驶领域的发展,激光雷达也越来越受到关注。很多一线公司都在这一技术上投入了大量的资金和人力。那么,与以往的摄影测量与遥感技术相比,移动激光扫描技术具有哪些特点?目前的发展情况如何?
林祥国:移动激光扫描是指在机动车上装配全球定位系统、惯性导航系统、激光雷达扫描系统、数码相机或者视频设备、并使各个设备同步,在车辆的行进中,采集道路及道路两旁地物和地面的空间位置、激光点云或影像数据。
相对于以往的摄影测量与遥感技术,移动激光扫描技术具有以下特点:①通过硬件设备的同步,激光点云数据直接具有地理三维坐标,避免了地面激光扫描点云数据的拼接;同时影像和激光点云直接配准,便于两者的融合;②从街道视觉获取数据,可以获取其他星载、机载系统无法或者很难获取的数据,如建筑物立面、交通标志;③激光点云直接包含三维信息,克服了阴影、遮蔽等因素对二维影像的负面影响;④由于扫描位置距离目标近,移动激光扫描获取的点云密度显著的高于机载和星载平台获取的密度,绝对精度也由于光线传播距离短而优于机载和星载平台的精度;⑤运行方式灵活,可以放置在多种类型的移动平台(如三轮车、火车、船只)上,避免了机载技术对天气和飞行管制的依赖。
鉴于上述优势,移动激光扫描技术得到了广泛的重视。从上个世纪90年代起,美国Berkeley大学、哥伦比亚大学、荷兰的欧洲联合研究中心、英国诺丁汉大学、日本东京大学柴琦研究所都开展的相应的硬件系统研发工作。
国内,武汉大学、首都师范大学、中国测绘科学研究院、北京航空航天大学、同济大学、吉林大学、山东科技大学、中科院深圳先进技术研究院、诸多生产电子导航地图或研发自动驾驶的商业公司等也开展了相关系统研制。
目前,国内外陆续出现了一系列商业化的系统,如:加拿大Optech公司的LYNX、加拿大Applanix公司的LandMark、德国3DLaserMapping公司的StreetMapper、立得空间信息技术股份有限公司的LD2000、四维远见的SSW、征图三维(北京)激光技术有限公司SZT-R1400、上海华测导航技术股份有限公司MS-900等系统。
泰伯网:此前你提到了高精度地图的生产分为外业采集、内业处理两大部分,我们刚才已经谈了外业采集,那么内业处理包括哪些内容?
林祥国:内业处理是指对移动激光扫描系统获取的数据经事后编辑处理形成各种有用的专题信息,又被称为后处理。
内业处理进一步包括自动化处理、人工验证编辑两个部分。自动化处理是指由计算机进行自动的数据融合和目标识别。简单的说,就是把行车轨迹、点云、图像等数据叠加到一起,然后进行道路标线、路沿、路牌、交通标志等道路元素的自动识别。
另外,由于自动化处理不可能做到百分之百的准确,所以得再进行后续的人工验证和编辑。操作员把自动处理之后的高精度地图数据和对应位置的图像、点云信息作比对,找出错误的地方并进行更正。比如,如果系统把一个限速牌错误识别成了90km/h,而实际是60km/h,这时需要进行人工修正。
目前,移动激光扫描系统自带的软件和高精度地图生产厂商开发的软件均具有良好的数据可视化和人机交互功能,可以方便的进行人工验证编辑。
泰伯网:如何理解高精度地图生产过程中遇到难点和痛点?
林祥国:迄今为止,自动化、智能化点云处理和信息提取,尤其是点云分类和目标识别,又是高精度地图生产的难点和瓶颈,主要表现为下述三点。
首先,商业化的点云处理软件一般是面向机载激光雷达点云数据处理的,对地面、植被、建筑物等少数类别的区分能力较好,但对车载激光雷达点云的适用性有限,主要是由于车载激光雷达点云的密度更高、地形地物类别更丰富、数据的复杂度更高。
第二,多数的车载激光雷达点云数据的处理方法和算法仍然停留在科学研究、实验室内用阶段,目前鲜见商用的车载激光雷达点云数据处理软件。
第三,开源的点云处理软件或者库存在需要较多的参数输入、大量的训练样本、处理效率不高、单次处理的数据量小、内存耗费大等问题。

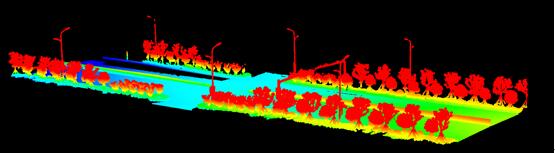
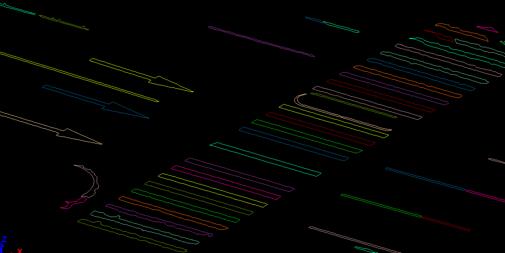
(1)车载激光雷达点云
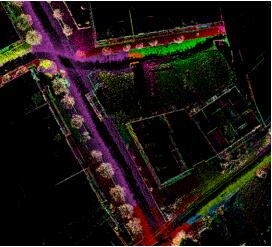
(2)多尺度点云分割效果
(3)图(2)局部透视图
(4)点云分类效果
图1 车载激光雷达点云数据、分割及分类效果图
泰伯网:林博士,据了解你所研发的这款软件在此前的路测环节取得了不错的成绩,能否为我们介绍一下软件研发的背景和功能设计?
林祥国:点云催化剂(Point Cloud Catalyst,PCC)是在国家自然基金委资助项目支持下,经历10年科研攻关,由我自主研发的一款点云智能处理商业软件,可用于车载、机载、地面激光雷达点云和影像密集匹配点云的分割、分类、目标识别和矢量化,尤其适用于面向高精度地图高效生产的车载激光雷达点云智能处理。
PCC软件采用了全新的融合多基元(点、线、面)的点云分析理论与方法,克服了既有商业软件采用单一点基元无法全面顾及地理现象和实体多尺度特征的局限性。该款软件包含了点云多尺度分割、滤波、道路交通标记线提取、路肩提取、杆状物提取、隔离路障提取、广告牌提取、交通信号灯横杆提取、天桥提取、建筑物立面提取、交通指示牌提取、车辆提取、垃圾桶提取、电力导线提取、树叶识别、林木参数半自动提取、粗差检测等17个功能模块,且每个提取模块可以同时完成类别区分、目标识别、矢量化等三种工作。
此外,每个模块不需要、或至多需要1-2个参数,且通常情况下使用参数缺省值也能取得较好的点云处理效果,克服了目前既有软件和相关算法需要大量人工干预和参数设置的弊端。
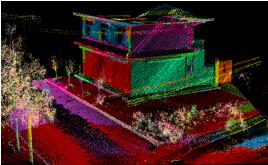
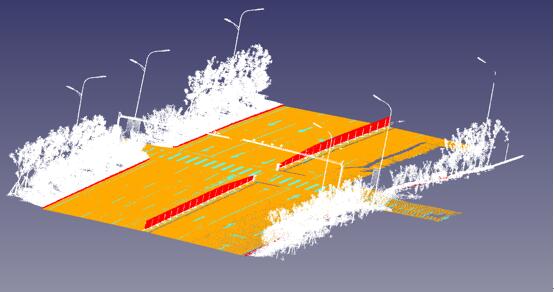
(1)车载激光雷达点云示意图

(2)点云分类效果
图2 车载激光雷达点云数据及分类效果图
目前,装配了该软件的单台计算机工作站可以在24小时内完成500亿个点的处理和信息提取任务,且在无需训练样本的情况下实现点云自动分类和目标识别精度均在90%以上,PCC软件具有高自动化、高智能、高效、高精度的优点。
另外,PCC软件还具有支持批量处理、处理的单个点云文件的大小不受算法的限制、仅受内存大小的限制的特点。该软件分类和目标识别结果均保存为las格式的点云标准文件、矢量化的结果保存为shp、或者dwg格式的矢量格式文件,便于与任何其他第三方点云处理、可视化和编辑软件的无缝衔接。比如,采用一台配备了64G内存、64位操作系统的Dell Precision T7610工作站,处理武汉市整个二环路的140G、las格式的点云数据,采用文件级并行处理方式,共耗时22.1小时,提取了14个大类、且整体分类精度达到91.6%。
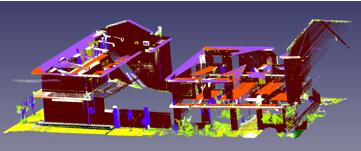
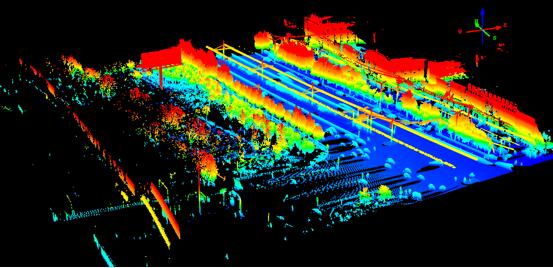
(1)车载激光雷达点云
(2)图(1)局部区域全自动的路面(黄色)、路沿(红色)、隔离路障(红色)、车道标记线(兰色)检测结果
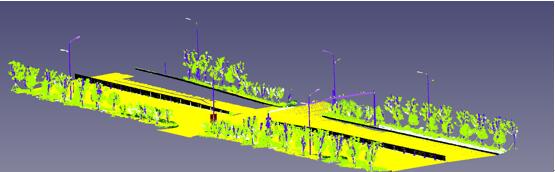
(3)点云分类效果
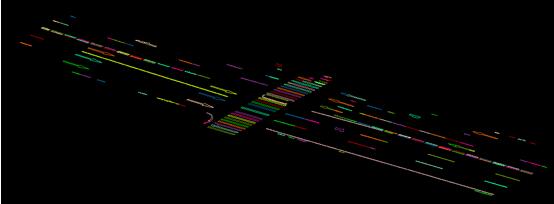
(4)自动提取的车道标记线矢量化效果
(4)图(4)的局部透视图
图3车载激光雷达点云、道路相关设施识别及分类效果
泰伯网:目前该款软件的市场定价是多少?下一步安排是什么?
林祥国:目前的市场定价是单机版每套50万,已经有部分企业在洽谈中。部分企业索取了试用版本进行测试,该款软件还有一大优势在于可以接受定制,根据企业的需求增减模板。
接下来,我会进一步优化和升级PCC软件,利用高性能计算技术进一步提高软件的计算效率,利用深度学习、增强学习理论和方法进一步提高软件的智能化水平,融合影像和点云数据进一步提高软件的识别精度,还将在近期内推出电力线路安全巡检模块、建筑物三维重建模块、地形地物变化检测模块等。
【软件研发者介绍】
林祥国博士:武汉大学博士,2010年-2012年在中国测绘科学研究院博士后流动站工作。目前,担任副研究员,硕士生导师,国际摄影测量与遥感学会(ISPRS)第三委员会(2016-2020年)第六工作组(遥感数据融合)秘书,影像与数据融合(International Journal of Image and Data Fusion)编委、Remote Sensing客座编辑。曾获得国家科学技术部2016年度遥感青年科技人才创新资助计划。作为项目负责人,先后主持中国博士后基金、国家自然科学基金青年项目、国家自然科学基金面上项目等10余项国家级和省部级课题。目前,已发表论文70余篇,其中SCI检索20余篇、EI检索论文30余篇;取得发明专利5项,申请发明专利4项。













{{item.content}}