
一、传统/新的作业模式
(一)【传统测绘作业模式】

【传统基础测绘作业】主要采用全站仪或RTK的测量手段,主要工作在外业,受天气影响较大,生产成本高,外业采集时间长。
(二)【航空摄影测量】

【航空摄影测量模式】公司摄影测量模式主要利用无人机为代表,搭载数码相机或者小型激光LiDAR,广泛用于数字正射影像图制作、高精度倾斜三维建模、地形图测绘等工作。
这种模式适用于1:1000/1:2000比例尺测图,对于高精度的大比例尺测图来说,其精度很难直接满足,需要大量的外业修补;同时,航飞通常都需要申请空域。
(三)【激光雷达技术/LiDAR】

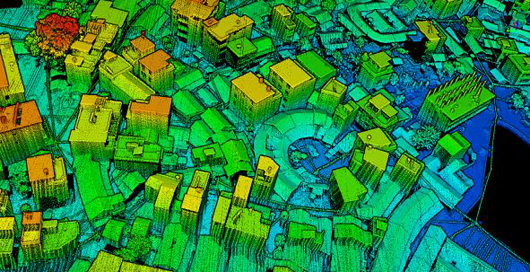
LiDAR技术具有高精度和高效率的特点,给基础测绘带来了传统测绘手段不具有的应用模式和技术优势。在实际项目中,多平台激光雷达可根据不同的作业环境和项目要求,灵活选择车载、机载、船载等多种作业模式,快速获取测区的海量高精度点云。广泛应用于高精度地形图测绘(1:500测图)、数字城市建设、高速公路扩建等项目。
如果在房屋密集且GPS信号较弱区域,机载和车载激光雷达无法作业,这时则可以结合无需GPS的SLAM背包激光扫描仪,对该区域进行数据采集,弥补车载、机载无法采集该区域点云的缺陷。
为此,本公司提出了一套崭新的能结合高精度和高效率的解决方案
—融合激光LiDAR和SLAM背包的基础测绘作业新模式—
完美地将大比例尺测图从外业搬到了内业
(四)【融合激光LiDAR和SLAM背包的基础测绘作业新模式】

1、激光点云测图方案优点
(1)海量数据
通过点云扫描方式,我们数据获取速度高达10万点/秒,短时间内即可获得该测区内海量三维点云数据。
(2)高精度
基于海量激光点云数据,实时获取地形地物的三维空间信息。同时,平面精度和高程精度均可控制在5cm以内。
(3)限制少
该仪器无需接触被测地区即可实现测量,不受天气、地形等外部条件的制约。
(4)效率高
基于该方案进行外业采集及内业三维测图工作,较传统综合法航测成图模式,作业效率提高了6-7倍。
2、激光点云测图仪器设备
(1)移动背包扫描系统(含点云数据后处理软件JRC)
【背包式扫描系统】是一款高精度激光SLAM测量系统,实现厘米级测量的同时建立2D/3D地图,配套强大的三维点云后处理软件JRC,实现大场景建模、量测、成图、空间分析等功能,是高精度、高效率的室内外一体化三维扫描与测量手段。
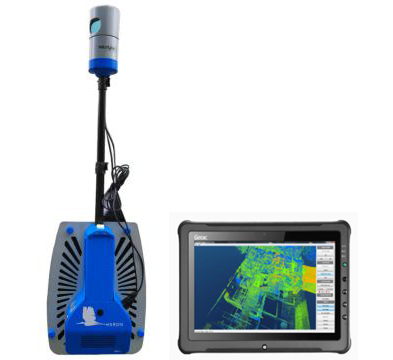
(图为 移动背包扫描系统)
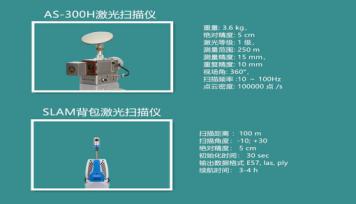
(2)激光雷达系统
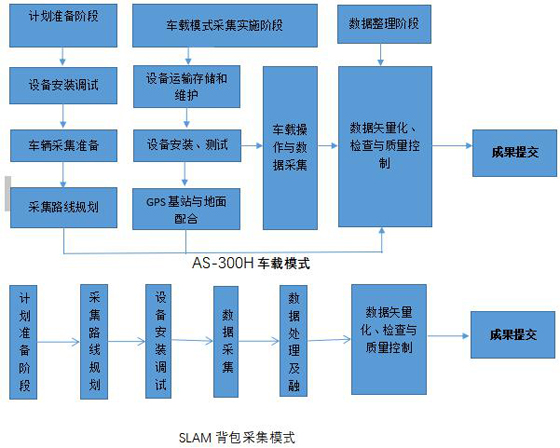
AS-300H多平台激光雷达系统,集成高精度激光扫描仪与惯性导航系统,适用于在各种移动平台上进行数据采集。采用多种设备(无人机机载、车载、船载、背包)搭载使用,全方位扫描采集数据,切换不同模式以适应各种作业环境。
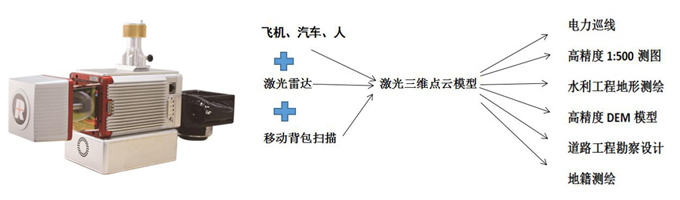
(图为 激光雷达系统) (图为 激光雷达应用方案)
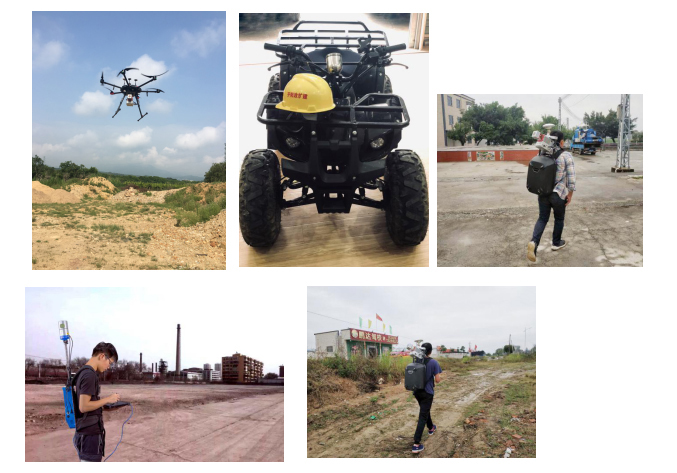
( 以上图为 激光雷达搭载平台)
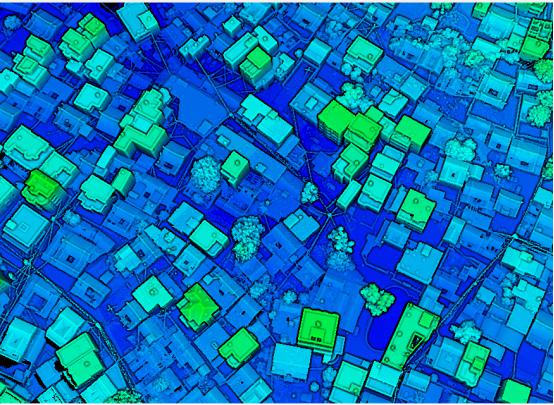
—内业成图欣赏—
二、实地应用案例
【应用案例一:粤东某地区1:500地籍测量激光点云测图项目,面积30平方公里】
(一)设备投入
(图为 激光点云扫描仪)
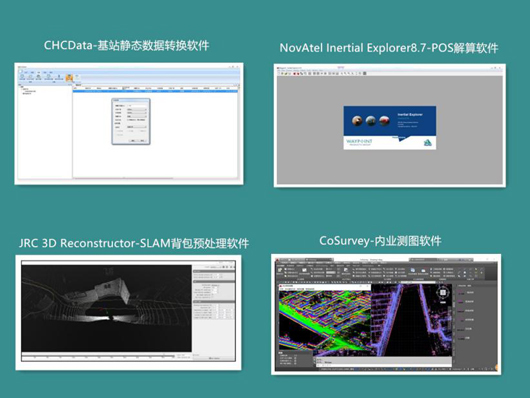
(数据处理软件)
(二)作业流程
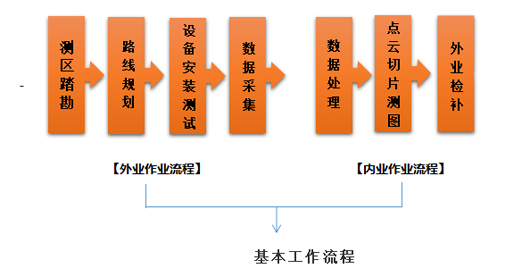
1、测区踏勘

外业工作人员在外踏勘
2、路线规划

3、设备安装测试

根点大样、根点观测、架设基站

多平台激光雷达静止
4、数据采集
根据不同的作业环境和项目要求,灵活选择车载、机载、背包式等多种作业模式,快速获取测区的海量高精度点云。

01 机载式扫描 02 背包式扫描 03 车载式扫描
5、数据处理
(1)激光雷达系统
针对采集回来的数据采用Interial Explore 软件进行数据的后处理,解算出准确的具有三维空间坐标的激光点云数据。
基站文件处理 Inertial Explorer 软件解算点云工程 点云输出处理
(2)SLAM背包扫描系统
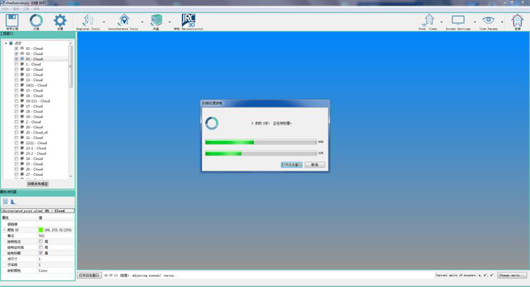
点云工程解算
SLAM背包扫描系统与激光扫描系统点云融合
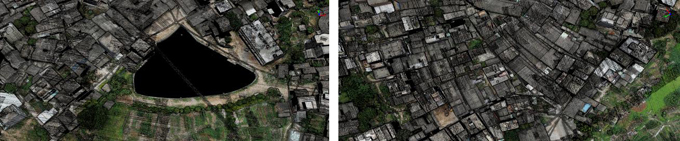
(3)点云预处理

1:500正摄影像 点云着色处理
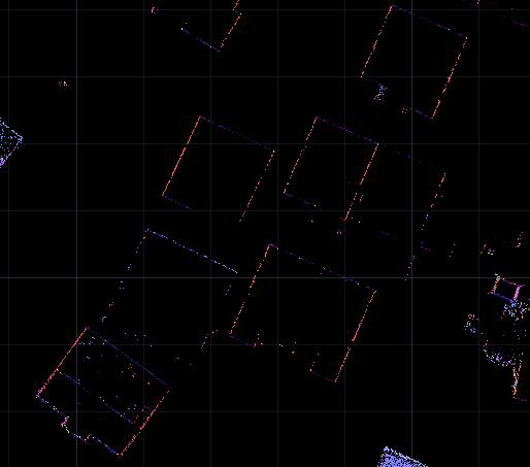
6、点云切片测图
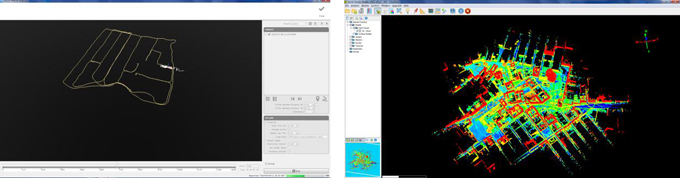
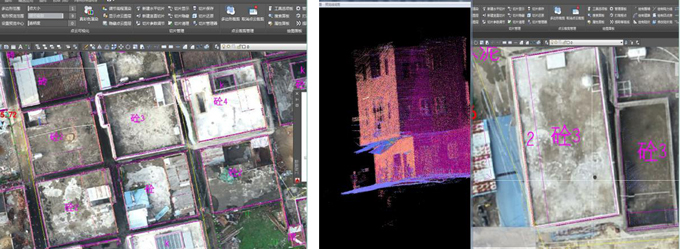
(1)三维点云模型
利用AS-300H激光LiDAR扫描仪和SLAM背包结合的作业方式,全方位获取建筑物空间位置信息,并在此基础上生成高精度的三维坐标模型。通过旋转点云模型可清晰观察到房屋的结构、层数等细节。
不同渲染方式下点云模型
①真彩色三维点云模型(彩色的为点云)
真彩色渲染方式点云模型是通过激光扫描仪搭载的相机拍摄的图片,通过空间定位,链接原片进行点云色彩着色。AS-300H激光LiDAR扫描仪和SLAM背包都具备拍摄功能。
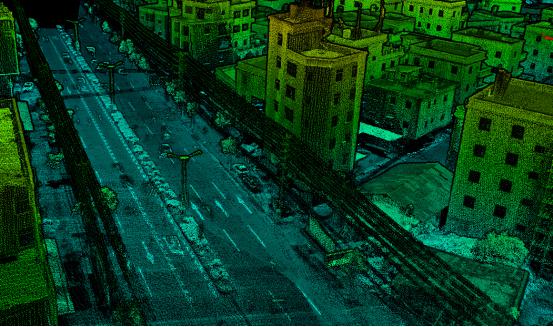
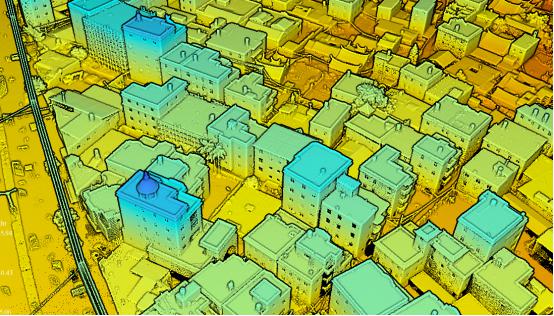
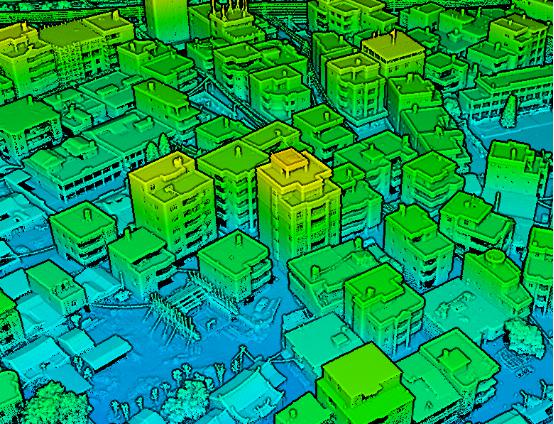
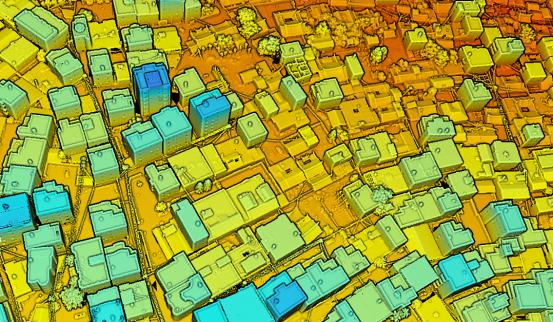
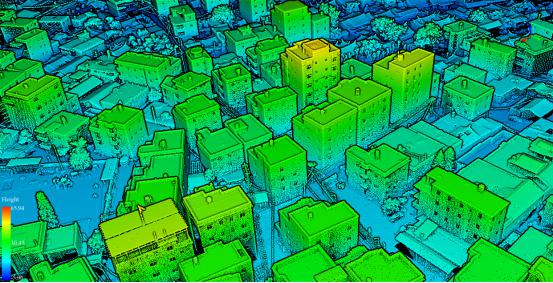
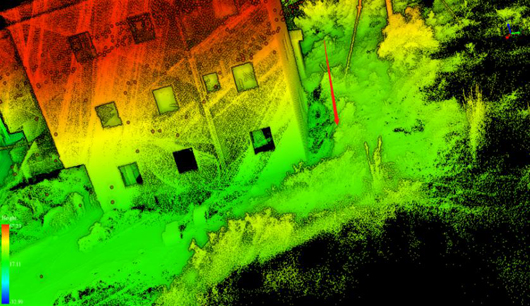
2高程渲染方式的点云模型
高程渲染方式点云模型是通过具有三维的空间坐标的特征,利用点云的不同高度对点云渲染不同的颜色,方便快捷判读不同高度的空间地物。
3反射强度渲染方式的点云模型
反射强度渲染方式点云模型是激光扫描点云对地物不同强度感应,反应地物形态的一种模式。该渲染方式,可以清晰判断出路面上管井等地表设施。

(2)内业编辑成图及信息提取
①模型层次判断
采用点云水平切片,内业测图可直接对建筑物、道路、水系进行矢量化并赋属性值。通过模型判断其结构层次。
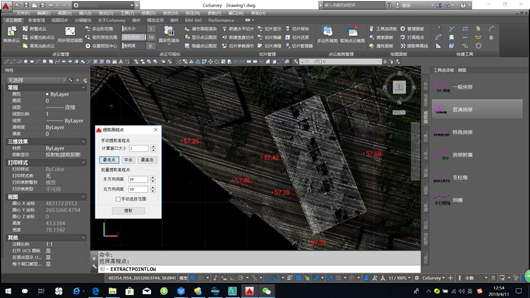
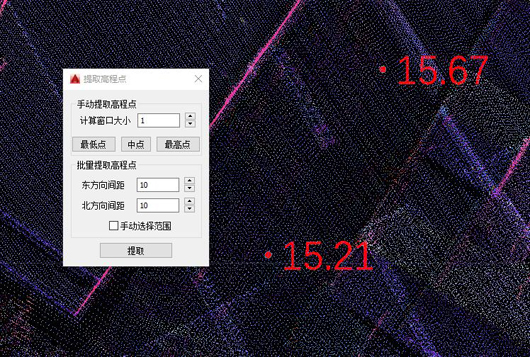
2特征点高程信息提取
通过点云,直接获取地形(或地物)特征点高程信息。
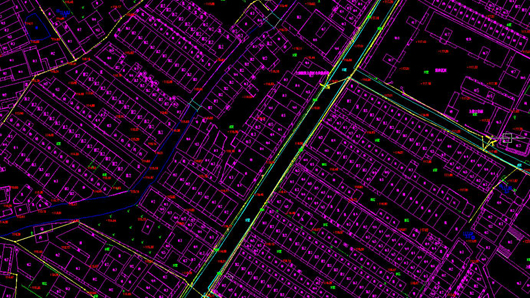
3线画图
通过点云采集,完成的线画图。
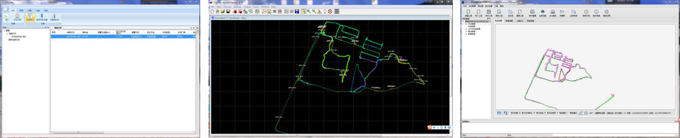
(3)内业成图步骤
使用点云成图软件对解算后的点云数据进行内业测图,按照项目技术设计的要求形成1:500地籍图。
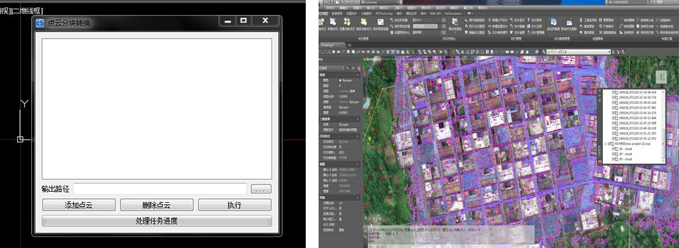
01 cosurvey点云工程建立 02 点云叠加影像作业
03 点云切片成图 04 结合三维模型查看房屋信息
7、外业检补
为追求高精度,还会进行外业检补、完善。

高程点检查
成果打点拉边检查
(三)工期及效果
整个1:500地籍图测量项目,总面积约合30平方公里,投入外业人员6人,内业处理人员18人,项目共历时46天。该项目成果平面及高程精度均达到(超过)设计要求,取得良好的社会效益及经济效益。
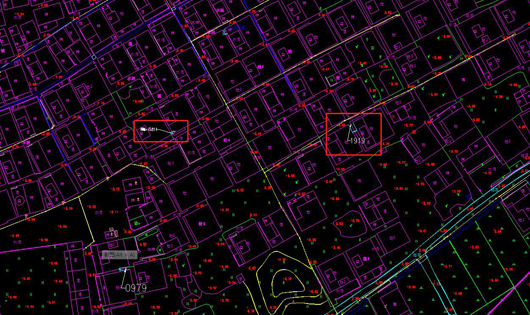
(四)成果图

【应用案例二:粤东某地区1:500地形测量激光点云测图项目,面积70平方公里】
(一)设备投入

多平台激光雷达测量系统AS-300H
点云密度100000点/秒
有效射程250米
绝对精度5cm以内

SLAM背包扫描仪
扫射距离100米
绝对精度5cm以内
无需GPS信号
初始化时间30 sec
续航时间3-4小时
(二)作业流程
(三)外业采集

基站架设
数据开始采集前,基站需要架在已知控制点上,确保数据采集过程中与基站进行联测。

车载数据采集
过车载对测区进行三维激光点云数据的采集,高效轻松,大大减少的外业人员的作业强度。

SLAM背包扫描采集
房屋密集GPS信号较弱区域采用背包模式对该区域进行数据采集,弥补车载没法采集 区域,两者结合保证了数据采集的完整性。
(四)数据处理
车载与背包处理后的点云成果
1、点云成果

后处理的点云模型不仅具有高精度,还具有非常丰富的各种地物地形信息。如电线、电线杆、通讯线、通讯杆、井盖等。
2、点云模型

旋转点云模型,通过强度渲染模式可以清楚看到路面的指示箭头,路中的花圃及路边线等都可清晰分辨。

不同地类的分界线、田埂水沟等都可清晰辨别。
房前屋后以及各种地方的坎,如左图箭头所示,三维点云模型上都可以清晰分辨出具体位置以及坎底坎顶的高度。
因此,处理的三维点云模型丰富的空间信息,完全可以满足1:500地形测量的要求。
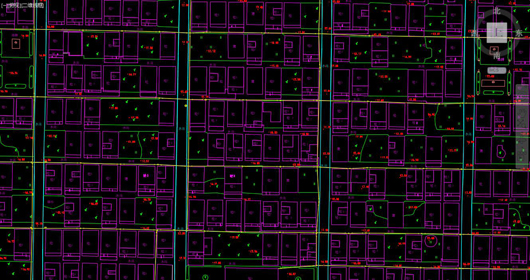
(五)内业成图
通过点云水平切片技术直接勾绘房屋及地物边线,对建筑物及各种地物进行矢量化处理。
软件自动提取地面点高程,保证地形区域高程精度。
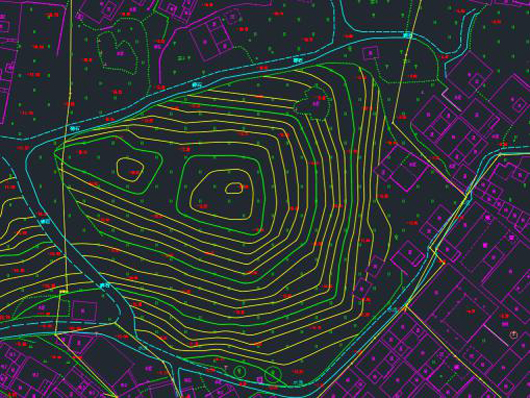
1:500地形矢量化成果图

1:500房屋区矢量化成果图
(六)工期与效果
整个项目1:500地形图测量项目,总面积约合70平方公里,投入外业人员6人,内业处理人员18人,项目共历时约3个月。通过与传统的测量的效率对比,点云测图效率综合提高8倍以上,各项精度均满足1:500地形图的要求。











{{item.content}}