
美国当地时间6月17日,百度 Apollo 在 CVPR2019 公开了国内唯一的 L4 级自动驾驶纯视觉城市道路闭环解决方案——百度 Apollo Lite。在会议上,百度 Apollo 技术委员会主席王亮就 L4 级全自动驾驶(Fully Autonomous Driving)环境感知技术方案进行了讲解。
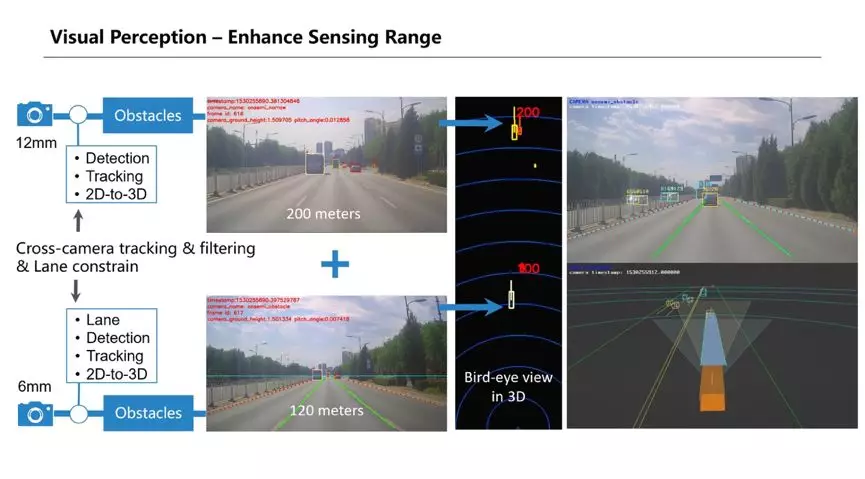
王亮介绍道:Apollo Lite 是目前国内唯一的城市道路 L4 级视觉感知解决方案,能够支持对10路摄像头、200帧/秒数据量的并行处理,单视觉链路最高丢帧率能够控制在5‰以下,实现全方位360°实时环境感知,前向障碍物的稳定检测视距达到240米。
经过前期的技术研发投入和2019年上半年的路测迭代,依靠这套10相机的感知系统,百度无人车已经可以在城市道路上实现不依赖高线数旋转式激光雷达的端到端闭环自动驾驶。
目前,Apollo Lite 已经在北京稻香湖等多地多路段落地测试。
在路测过程中,测试车辆数目、累计测试里程和车辆在城市道路上的闭环自动驾驶表现可与全球最大的 ADAS(高级辅助驾驶技术)供应商 Mobileye 提供的纯视觉解决方案相媲美。
相比旋转式激光雷达感知方案,视觉感知方案价格低且便于获得。
这套低成本近车规级环视感知方案也能够降级支持 ADAS 辅助驾驶应用,创造更多有价值的应用场景,将 ADAS 产品的能力提升到一个新的高度,为企业、开发者们提供了一个低价、优质的自动驾驶解决方案。
摄像头是相对成熟的传感器,除具备轻巧低成本和符合车规的优势外,高分辨率、高帧率(成像频率)的成像技术发展趋势意味着图像内蕴含的环境信息更丰富。
同时,视频数据也和人眼感知的真实世界最为相似,但和三维点云数据相比,二维图像中的信息更难挖掘,需要更强大的算法、大量数据的积累和更长期的研发投入。
王亮表示:百度 Apollo 始终坚持多传感器融合的技术路线。在 L4 级自动驾驶传感器选型上,激光雷达和摄像头不是排它的,也不是单纯的从属和互补关系。从安全性考虑,二者具备相同的重要性和不可替代性,缺一不可。
现今很多传感器融合的方案设计较为复杂,技术人员往往从快速解决问题的角度出发设计算法,这个过程中难免避重就轻地利用异构数据各自的优势进行缺陷互补从而绕过困难的问题。
基于这种思路设计的多传感器融合方案虽然能够在短期规避单传感器方案难以解决的问题,长远看,数据和策略间深度耦合的设计不利于为环境感知系统提供真正意义上的冗余(true redundancy)。
传感器融合意味着多套能够独立支撑全自动驾驶的感知系统强强联手,独立工作相互校验,最大概率地保证感知结果的准确性和完备性。
对此,王亮强调:百度下决心投入资源研发纯视觉感知解决方案并不意味着放弃现有基于激光雷达的技术路线,而是在技术实践过程中充分意识到无人驾驶系统 true redundancy 的必要性,决定通过压强环视视觉技术来夯实多传感器融合感知框架。
在激光雷达为主、视觉为辅的传统融合策略中,视觉感知自身的问题和缺陷在雷达感知的掩盖下暴露不够充分。
今天通过 Apollo Lite 打磨迭代的纯视觉技术正在持续反哺百度坚持的多传感器融合解决方案,提升无人驾驶系统的鲁棒性和安全性。
技术的发展是自动驾驶产业的必备要素,而在技术进步的同时,为企业和开发者打造低价、易获取的解决方案,更是推动产业发展的重要一环。
未来,百度 Apollo 开放平台将会在推进自身技术进步的同时,为自动驾驶的规模化、量产化提供全新的技术支持。我们相信,只有让技术在更多人的手中得以利用,自动驾驶产业的发展才能更加蓬勃!













{{item.content}}