
2017 年 4 月 20 日,已经离开 Google 并且创立了 Aurora Innovation 的 Google 自动驾驶项目前 CTO 克里斯·乌莫森(Chris Urmson)受其母校卡内基梅隆大学机器人研究所下属的旭古一田机器人学纪念讲座(Teruko Yata Memorial Lectures in Robotics)的邀请,回 CMU 做了一场名为「对自动驾驶汽车的基本观点」(Perspectives on Self-Driving Cars)的讲座。
在该场讲座中,Urmson 对自动驾驶汽车发表了 4 个基本观点(讲座的完整视频可以登入 YouTube 观看,网址为:https://youtu.be/BtgBySRrN0Q):
实现大数据的完备性比想象中要困难的多;
理解人类意图是无人驾驶汽车的根本挑战;
从 SAE Level 2 逐步升级到 SAE Level 4 + 的技术路线是行不通的;
「电车难题」是一个有趣的伦理学思想实验,但只是存在于大脑中而极小概率会会发生于现实中。
上述观点得到了行业其他专家在不同场合独立发表的观点的交叉验证,因此整体较为可信。
引子:第 37 张测试许可证
2017 年 7 月 28 日,由三位自动驾驶领域明星公司技术负责人共同创办的初创公司 Aurora Innovation 拿到了加州机动车管理局(Department of Motor Vehicles,California)颁发的第 37 张自动驾驶汽车道路测试许可证(如图 1 所示),距离公司成立仅 9 个月时间。

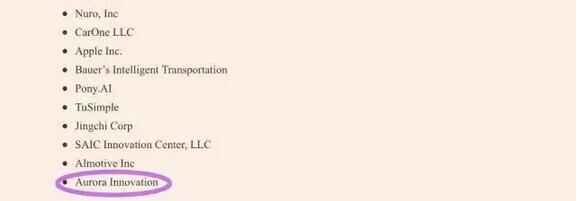
图 1 拥有自动驾驶加州路测许可证的公司名单
作为众多自动驾驶领域的诸多初创公司之一, Aurora Innovation 无疑是最特别的那个,因为三位公司创始人的学术背景与工作背景使其有了极高的起点,如表 1 所示。不可否认的是,整个自动驾驶汽车产业目前之所以能够获得前所未有的社会关注度和资本市场热捧,离不开 Google、Tesla 与 Uber 这三家明星公司的大力探索和率先垂范。
而现在,这三家企业自动驾驶项目的技术负责人克里斯·乌莫森(Chris Urmson)、斯特林·安德森(Sterling Anderson)以及德鲁·巴格奈尔(Drew Bagnell)齐聚于 Aurora Innovation,它的技术水平可见一斑。
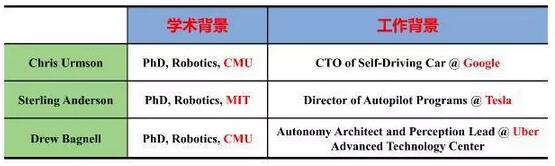
表 1 Aurora Innovation 三位创始人的学术背景与工作背景

图 2 Aurora Innovation 三位创始人(从左至右依次为:Chris Urmson,Sterling Anderson 和 Drew Bagnell)
如表 1 与 图 2 所示,Urmson 与 Bagnell 毕业于卡内基梅隆大学,且后者目前仍然担任 CMU 的副教授,而 Anderson 毕业于麻省理工学院,CMU 和 MIT 同属全球著名的计算机四大牛校。三人都拥有机器人学博士学位,而自动驾驶汽车本质上可归为轮式机器人的一种。
日前,Aurora 在受访时向 Fortune 杂志证实,该公司已经开始在封闭测试区上测试自动驾驶汽车,目前正为加州的公共道路测试做准备。Aurora 并没有公布加州路测何时开始,测试车辆有多少台,以及这些车辆的型号。但在 4 月的采访中,Aurora 表示正在基于 2017 款奥迪 Q7 搭建前前数据采集平台(pre pre alpha data-gathering platform)。目前,Aurora 在加州帕洛阿尔托市和宾州匹兹堡市设有办公室。[page]
Aurora Innovation 的战略定位
Urmson 和 Anderson 对 Fortune 杂志表示,Aurora 将开发一个可以应用于不同公司的不同车型上的自动驾驶系统,即为自动驾驶汽车开发「全方位解决方案」(full-stack solution)。在此过程中,Aurora 将与一家或几家汽车制造商或一级供应商合作,以设计、开发及调试大规模部署全自动驾驶汽车(即 SAE Level 4 +)所需的传感器、软件和数据服务及其正确的组合方式。
Aurora 的重点将放在软件而不是硬件上,即致力于为自动驾驶汽车创建底层技术(underlying technology)并基于此帮助汽车制造商和其它公司搭建自动驾驶系统和服务,而不是从零开始设计与制造汽车或者大批量生产摄像头、毫米波雷达或激光雷达之类的自动驾驶汽车所需的传感器。Aurora 这么做的最终目的是想让客户的自动驾驶汽车尽快上路测试。
对此,Urmson 解释道,「Aurora 的最终产品可能会需要一套标准的传感器组合以及车载计算单元的硬件载体来发挥效用,但不会针对某款具体车型做专门的匹配优化,汽车厂商可以根据自己的需求将 Aurora 的产品融入自己的车型中。目前,各大公司在自动驾驶软件方面都在做着相同的工作——准确地感知汽车周围的环境,并根据这些被收集的信息决定下一步做什么——或许应该有几家供应商来为所有企业提供共性技术。」
此外,Aurora 不涉足硬件制造与创始人对对传统车企的看法有关。与科技行业的某些认为主要汽车制造商速度过慢的人不同,Urmson 非常尊重传统汽车企业及其大规模生产优质复杂产品的能力:「人们都在谈论硅谷,谈论复杂事物和创新事物,然而这些传统汽车企业每两分钟就能生产出一辆高度复杂的汽车,而且能用上 15 年而不出大的故障。」
笔者认为,Aurora 的价值在于,三位创始人对于全自动驾驶汽车所需的传感器和软件如何设计与测试、自动驾驶系统需要配置多少算力有着深刻的理解以及极其稀有的一线研发经验与领导经验,可以向行业的其它公司提供极有价值的指导意见。
Chris Urmson 对自动驾驶的 4 个观点
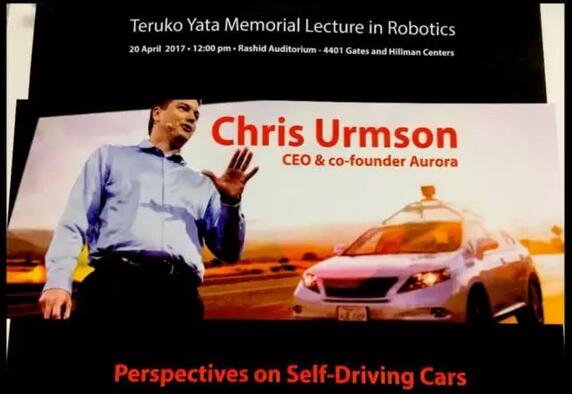
图 3 Chris Urmson CMU 讲座海报
1. 实现大数据的完备性比想象中要困难的多
就目前而言,人工智能领域的基本理念是通过数据驱动(Data-Driven)方法来解决所遇到的问题。而要精准有效地解决问题,就要尽可能地保证所收集到的大数据的完备性(Completeness)。
在讲座中,Urmson 引用官方统计数据,即 2015 年仅在美国,在警局有案件记录的交通事故共有 630 万起,共造成 3.5 万人丧生以及 244 万人受伤。但 Urmson 估计,「实际发生的交通事故数量是记录在案的 2 ~ 10 倍」。其所隐含的含义便是——仅仅解决这些案件中所体现的自动驾驶决策问题,还远远达不到大数据的完备性!
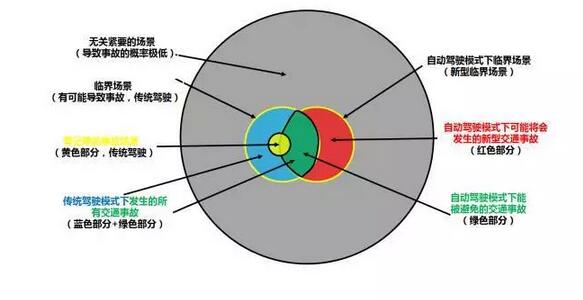
图 4 自动驾驶汽车测试验证过程中的暗物质问题
目前,我们只知道标准场景(即封闭测试园区中提供的场景)以及被报道过的事故场景(即有记录的事故),即图 4 中的黄色区域。对于从不会产生事故的操作到引发事故的操作的转变概率,以及临界场景(如图 4 中的黄色边界线所示)的类型和发生频率,我们目前几乎一无所知。
由此,为了测试并验证自动驾驶汽车的安全性,需要获取足够数量的有效的临界场景及其特性,与此同时,还需获取刻画自动驾驶系统以安全的操作方式应对临界场景的能力的有效模型。
可以想象这是多么繁重且旷日持久的工作量!
2. 理解人类意图是无人驾驶汽车的根本挑战
Urmson 在讲座中提到:「自动驾驶汽车的决策在很大程度上取决于理解和匹配道路上其他人类驾驶员的预期,而理解人类意图是自动驾驶汽车的根本挑战。」对于 Urmson 而言,这一难题是目前整个自动驾驶所遇到的大部分问题的核心。
在讲座中, Urmson 为了阐释这一观点,在讲座中列举了 3 个由于自动驾驶测试车辆对人类意图理解不准确而最终引发交通事故的案例。

图 5 自动驾驶汽车在识别人类意图方面表现的不理想
如图 5 所示,一辆无人驾驶汽车无法对在人类驾驶员看来是一目了然的事情作出准确判断:正在路边交谈的两个人(左图)并不打算过马路,但如果一个人转身离开,并朝着马路方向走去,说明他们要过马路了(右图)。
准确识别并理解这种隐含在人们行为的意图,目前对自动驾驶汽车而言尚显困难。

图 6 讲座现场座无虚席
3. 从 SAE Level 2 逐步升级到 SAE Level 4 + 的技术路线是行不通的。
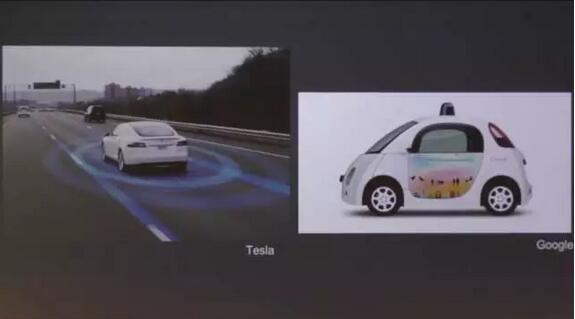
图 7 自动驾驶领域的路线之争:Tesla VS Google
自动驾驶领域存在所谓的路线之争,即:
以 Tesla 为代表的汽车制造商,选择从 SAE Level 2 逐步升级,直到代表无人驾驶水平的 SAE Level 4 +;
以 Google 为代表 IT 企业,选择直接研制 SAE Level 4 + 的无人驾驶汽车。
其中,SAE Level 4 + 代表 SAE Level 4 与 SAE Level 5 两个自动驾驶级别。
在讲座中,Urmson 明确表态,支持老东家 Google。他认为高级驾驶员辅助技术(即 ADAS)与无人驾驶技术是两种截然不同的技术,逐步增加自动驾驶水平的做法会使工程师在设计中选择那些将会限制自动驾驶汽车升级到 SAE Level 4 + 的技术。
无独有偶,CMU 电子工程系教授菲利普·库普曼(Philip Koopman)在其论文《Philip Koopman CMU-Challenges in Autonomous Vehicle Testing and Validation》(SAE Paper 2016-01-0128)中提到,由于 ADAS 遵循的是「驾驶员在环」(Driver in the Loop)模式,自动驾驶汽车在行车过程中出现任何问题,最后都可以求助人类驾驶员来「擦屁股」;相反,无人驾驶汽车为「驾驶员非在环」(Driver out of the Loop),在遇到突发问题时,一切都要靠自身来解决,并不会有人类驾驶员来帮忙。
由此,在设计 SAE Level 3 及以下的自动驾驶汽车的软件系统时,需要提前考虑到并提前做好应对方案的场景数量相比于 SAE Level 4 及以上将呈现好几个数量级地减少。在设计硬件时前者也不需要将设计指标(可以理解为「安全系数」)往最严苛的方向调整,因为只要硬件出问题了,人类驾驶员会发现,并采取安全措施,而后者则正好相反。
综上所述,在 SAE Level 3 与 SAE Level 4 之间有着大而深的鸿沟,两者之间相隔着好几个数量级的设计难度以及测试与验证方面的工作量,非技术高超且坚韧不拔者难以逾越。
4.「电车难题」是一个有趣的伦理学思想实验,但只是存在于大脑中而极小概率会发生于现实中
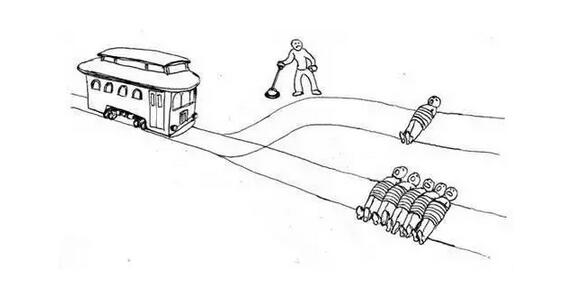
如图 8 所示,伦理学中的「电车难题」大致可以表述如下:一辆失控的有轨电车正在加速驶来,前面的轨道上有 5 个小孩在玩耍,来不及通知并且片刻后就要碾压到这些小孩。幸运的是旁边正好还有一条轨道,但是上面也有 1 个小孩。在这种情况下,司机是否应该选择变轨?
从 Urmson 在讲座中的口吻可以感受到,在他看来上述思想实验实在是有些无聊。
首先,无人驾驶汽车会提前探测到上述情景(通过 V2X 或者车载传感器),从而提前规避掉,在实际运行过程中上述情景发生的概率小到可以忽略不计。
退一万步讲,即便与上述情形类似的情形会发生,如在交通事故发生不可避免时,自动驾驶系统是选择保护车主还是路边的行人,厂商也可以通过提前告知消费者某辆车的自动驾驶系统所采用的是那种模式,将这个难题的选择权留给他们。
小结
由上文可知,Chris Urmson 在讲座所给出的对自动驾驶的 4 个基本观点中至少有 3 个并不是孤证,而是得到了其他学者在别的场合所独立发表的观点的交叉验证。
因此,这些观点整体上还是值得相信的。
让我们再次回顾一下这 4 个基本观点:
实现大数据的完备性比想象中要困难的多;
理解人类意图是无人驾驶汽车的根本挑战;
从 SAE Level 2 逐步升级到 SAE Level 4 + 的技术路线是行不通的;
「电车难题」是一个有趣的伦理学思想实验,但只是存在于大脑中而极小概率会会发生于现实中。













{{item.content}}