
实现自动驾驶的一大关键是,汽车可以准确无误地“看”到周围的环境,并实时做出正确的决策。这不仅仅要求汽车内带有大量功能强大且细分的传感器来感知环境,以及先进高效的软件系统来“思考”做决策,更需要的是所有可能街道的及时更新的地图。在这场新移动革命的众多技术中,3D高清地图已经被车企、科技公司等众多产业链参与者视作至关重要的功能。自动驾驶浪潮引发的高清地图大战由此燃起。
挖掘高精地图“金山”
在此之前的消费级数字地图竞争中,谷歌曾是无可争议的赢家,其赢得数字地图大战的关键是在全球范围内派出地图街景车采集数据,此外它还拥有地图导航公司、汽车厂商等无法匹敌的软件技术。谷歌希望将这一成功延续到自动驾驶时代。据彭博社报道,谷歌目前正在开发一个3D地图项目,可以更详细地捕捉到汽车在行驶时可能面临的各种危险。据称,该项目远远超出了谷歌地图目前所能提供的信息的范围。
不过,显然其他玩家都不希望谷歌在地图领域继续“一家独大”。这一次,诸多公司已经纷纷在地图领域展开角逐。
近日,由谷歌和苹果的前资深员工共同创立的硅谷高精地图与定位技术提供商DeepMap公布了其技术顾问委员会阵容,包括美国顶尖的技术专家Brian McClendon,Jaron Waldman和Leonidas Guibas。DeepMap依靠其智能软件来缩减将来自自动驾驶汽车传感器的图像转换为单一高分辨率景观所需的时间和成本。
在过去一年里,DeepMap对外宣布完成A轮融资,投资者包括Accel、A16z和金沙江创投等。同时,根据官方透露的信息,DeepMap已经在北美、亚洲和欧洲拥有多家客户和合作伙伴。目前,其公开合作的车企包括上汽硅谷创新中心、福特汽车以及本田旗下的加速器Honda Xcelerator。对外,DeepMap希望提供能够高效处理大规模数据的地图运行架构,进而提供高精度(厘米级)、低成本的地图和定位解决方案。在加州的Concord和San Jose等地,目前上汽的自动驾驶测试车辆已经搭载了DeepMap的软件。去年,创业公司Voyage在San Jose试运行的自动驾驶车辆上也使用了DeepMap的服务。
Civil Maps则具有可以辨别传感器数据的技术,该技术可利用测绘车辆在同一个地区制造的每一个回路形成数字网格。福特是Civil Maps的投资者。而谷歌长期以来的两大地图竞争对手,HERE和TomTom NV这两家欧洲公司,已将自己定位为谷歌地图的主要替代品,致力于向汽车制造商出售中控台地图。
此外,车企以及汽车零部件供应商同样将高精地图技术视作未来发展的关键。此前就有诸多媒体报道指出,宝马、戴姆勒等早已经将HERE高清实时地图认作其未来自动驾驶汽车不可分割的一部分。
今年1月初,汽车零部件供应商博世及大陆也表示,二者计划分别收购全球数字地图与定位服务供应商HERE 5%的股份。此前,博世与TomTom、高德地图、百度、四维图新等都签订过合作协议。
根据美国加州车管局2月初发布的报告显示,自动驾驶当前的主要难题还是复杂的交通环境造成系统出现脱离,而目前高精度地图配合传感器是应对复杂交通环境最有效的方案。
在中国市场,地图成为“香饽饽”还有另外一个原因,车企和外资零部件企业在国内没有地图测绘的权利。而高德、百度等就因拿到了国家测绘地理信息局发布的甲级测绘资质,可以在国内进行地图编制、导航电子地图制作等。
两种技术路线
在过去的一两年中,数十家公司或单干或组成联盟,投入数亿美元,追逐可能尚需数年乃至数十年才能实现的巨额回报。不过,这注定是一场成本高昂的考验。因为打造自动驾驶高清地图的艰巨程度不亚于打造自动驾驶汽车。与传统的数字地图不同,自动驾驶汽车地图需要几乎持续不停的更新。道路上哪怕细微至极的变化 ——“一夜之间”拔地而起的新建筑,或者是路上的一点点碎片——都有可能会影响无人驾驶汽车的行驶。
而随着自动驾驶技术逐步向全自动驾驶迈进的过程中,对于高精地图应用的要求也不断提高。要实现全自动驾驶,汽车需配备足够准确显示周围环境的高精度地图,误差不能大于10厘米。传感器和地图的结合使自动驾驶汽车能够及时修正数据上的误差,辨识车辆的准确位置并导航。并且,高精度地图能够核对传感器所接收的数据并帮助汽车精确监测周边环境。
目前,涉足自动驾驶车辆地图的公司主要采取两种不同的技术策略,即预先存储或是实时探测。
其中,预先存储,是指创建完整的高精度地图,让未来的无人驾驶汽车能够完全独立驾驶。这需要提前收集数据建立3D地图,在地图上标注好车道和交通牌等,同时要用GPS确定汽车大概的位置,通过与之前建立的地图进行对比,确认现在的位置(误差10cm内),并且要能够检测、追踪交通牌以及周边环境,避免碰撞完成自动驾驶。目前谷歌、百度、Uber等主要使用这一技术路线。
另一种实时探测,则是一步一步创建地图,即利用车辆上的传感器,让汽车逐渐加大自动驾驶的程度。这其中涉及到,用机器学习方法离线训练,使车能检测车道、行人和汽车,GPS 确定汽车大概位置,系统自动实时检测车道及周边环境,根据此前训练好的分类器实现对车道及周边环境的识别和追踪,完成自动驾驶。Mobileye、Here、TomTom NV所采取的就是这一策略。
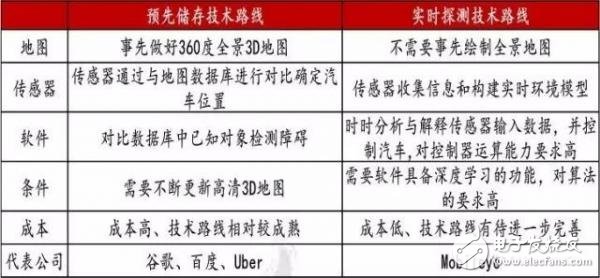
(两者技术路线对比)
尽管目前究竟哪种策略更好,业内也尚无最终定论。不过,有一种分析倾向于,尽管预先储存技术路线目前产业化程度较高,但无法用于未绘制地图地区以及后期高清地图维护成本较高等原因,将限制该技术路线的使用范围。而实时探测路线在目前技术条件下,其可靠性仍有待提升。目前结合预先储存技术路线和实时探测技术路线或是现实选择。从长远来看,实时探测技术路线或将是终极目标。













{{item.content}}